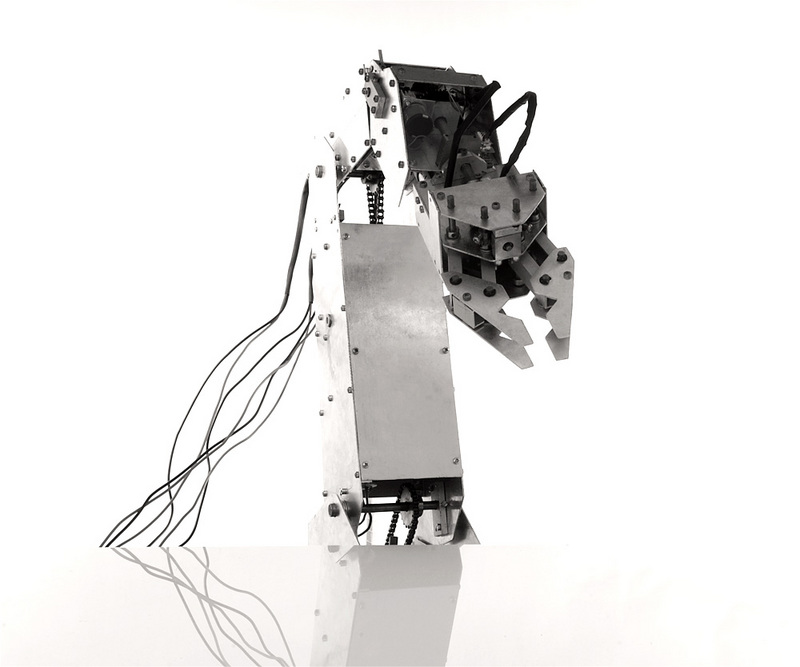
das hier war mein erstes microcontroller-projekt.
ist ein 5-achsiger manipulator.
gesteurt wird das ganze über einen atmega 2560 der uerber rs232 mit dem pc kommuniziert.
zur
bewegungsprogrammierung gibt es eine kleine GUI in der man
postionen anfahren kann und diese dann speichern. (teach in)
dann kann man das ganze in eine datei abspeichern und der arm macht die bewegungen.
habe dazu auch noch ein paar kleine videos auf youtube:
kommunikationstest, manuelle greifersteuerung
erster krafttest
test des 4. gelenks
das erste testprogramm
heir noch ein programm bei dem ein radiergummi maipuliert wird ;)
die bilder hat stubi gemacht danke dafür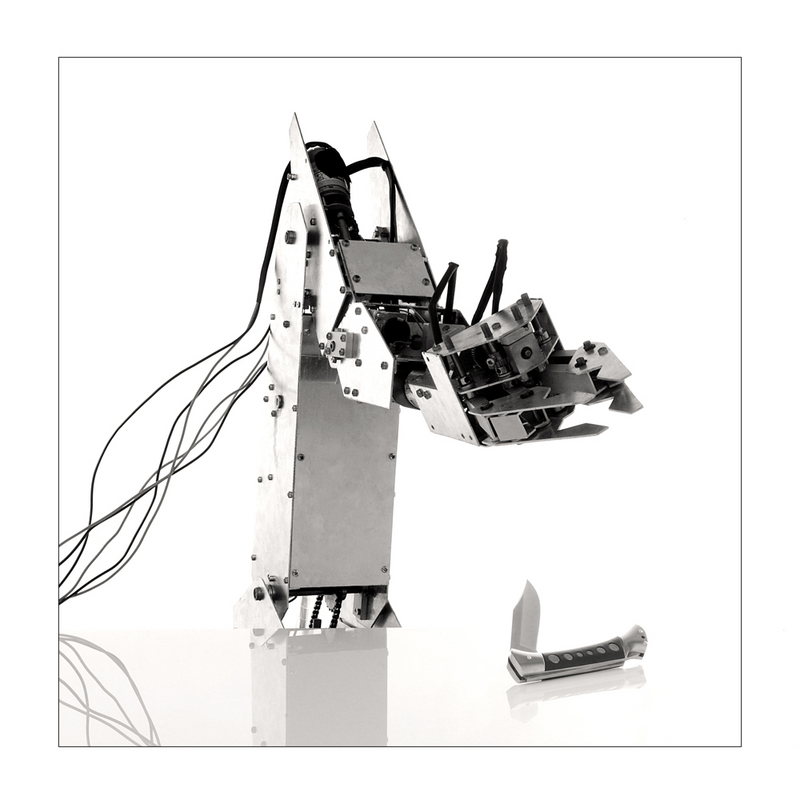

mehr dazu gibt es noch im roboternetz und zwar hier
der bot ist dazu geadacht automatsich cocktails zu mixen ;)
da
ich aber z.z an meinem quadrocopter baue habe ich ihn böserweise ein
wenig vernachlässigt, und die letzten beiden achsen nicht vollständig
fertig gebaut.
das werde ich aber (hoffentlich) noch irgndwann
machen. das meiste ist ja schon fertig und so ein maschinengemischer
cocktail schmeckt sicher noch um einiges besser, vorallem wenn die
alkoholmenge durch einen programmierfehler zu hoch eingestellt ist ;)