so.. heir geht es um meinen quadrocopter.
ein quadrocopter ist eine art hubschrauber mit 4 rotoren.
siehe dazu auch wikipedia
hier erst mal ein paar bilder:

technische details:
prozessor:
- atmega644 fuer flugregelung
- 2. atmega644 fuer navigation / autopilot (noch nicht implementiert)
sensoren:
- 3 gyroskop sensoren
- 3-achsiger beschleunigungssensor
- luftdrucksensor (hoeher)
- kompas (noch nicht implementiert)
- gps (noch nicht implementiert)
energieversorgung
- 3200mAh LiPo
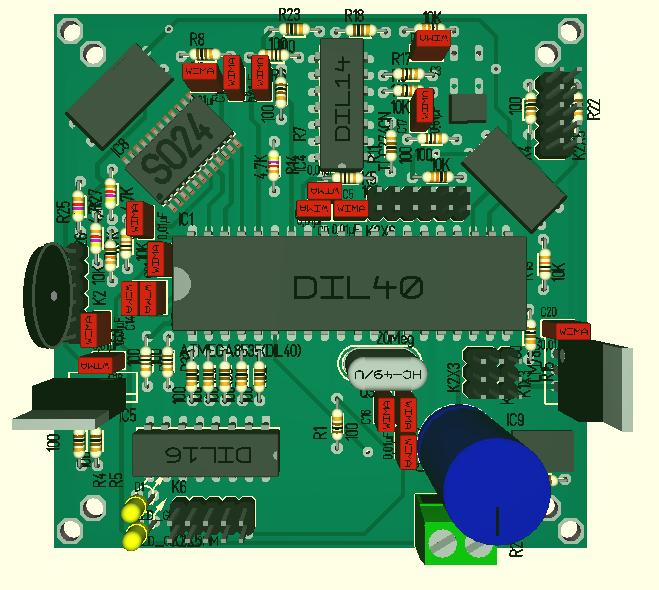
das
controllerboard habe ich bewusst nicht in smd sonder mit "altmodischen"
dill bauteilen aufgebaut, sodass man es auch wenn man nicht so der
loet-pro ist nachbauen kann.
das ist der schaltplan dazu (Version 4.0 ) (pdf datei)
wer
die aetzvorlage und die werte der einzelenen komponenten haben will
einfach kurz ne mail schreiben, dann lass ich die euch zukommen ( da
optimier ich grad noch ein wenig, desswegen stell ich die heir nich ein
sosnt sind sie gleich veraltet ;)
auf dem bild fehlen noch ein paar bauteile, aber so für den ueberblick isses ganz gut.

das
board hat ausgaenge fuer 2 servos, (um die kamera zu schwenken), 6
schaltausgaenge ( gehn theoretisch auch fuer servos, oder
kamerausloseser, fallschirm oder was man sonst damit anstellen will)
und nochmal 5 leistungsschaltasugaenge, z.b fuer positionsleuchten...
die
software ist in bascom, da die aber auch dauernd erneuert wird einfach
kurz anschreiben, damit ihr auch ne aktuelle version bekommt.
wer
will darf die software fuer eigene projekte benutzen, und auch
abaendern, allerdings nur fuer den privaten gebaruach, nix
kommerzeilles !! wuerde mich dann auch ueber rueckmeldungen zu den
verbesserungen freuen, dann hab ich auch was von ;)
steurung
erfolgt bis jetzt ueber eine nomrmale rc-funke, soll aber spaeter mal
mittels laptop / autopilot geamcht werden. das kann aber noch ein wenig
dauern ;) jetz gehts erst mal um die optimierung des flugverhaltens.
habe zu dem copter noch ein paar forenthrads und zwar im roboternetz zum copter allgemein , sowei im
x-ufo forum zum copter und zum gehause ,da kann man auch noch ein wenig nachlesen.
das neue gehause ist aus cfk laminiert und sieht ungefaehr so aus:
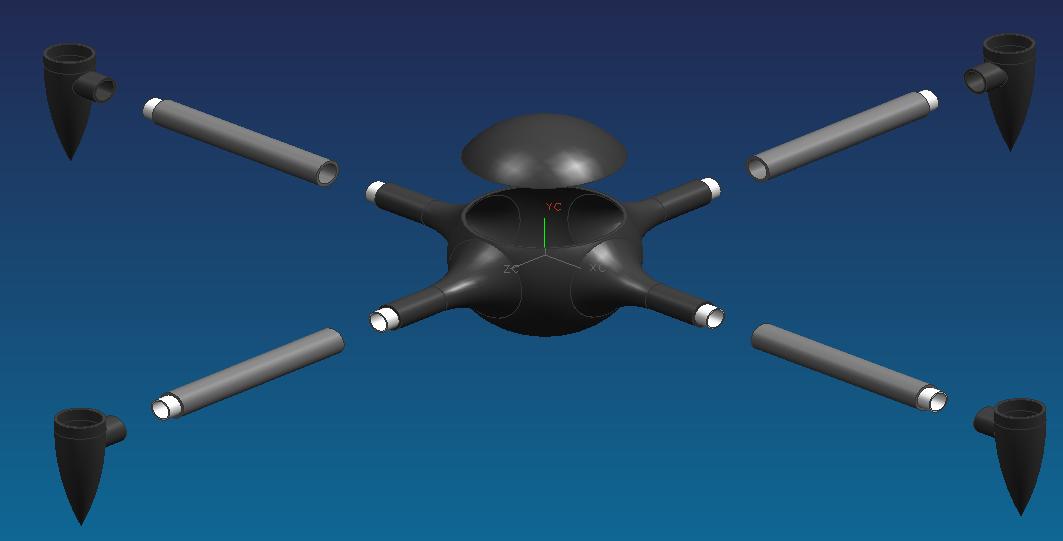
das war mal der erste entwurf.
habe das dann erst mal testweise aus gfk (is billiger) laminiert
siehe heir:

und mit auslegern zusammen in cfk sieht das ganze dann so aus:


die
verbindungen sind bis jetz aus duct tape (gaffa) aber ich lass mir grad
schöne verbindungen aus alu drehen, dann wird das ein wenig stylisher.
(kleine
anmerkung am rande: waehrend ich das gerade schreibe sitzt neben mir
auf m sofa unsre ratte und zerlegt einen weinkorken in ganz viele teile

:) hab doch vorehr erst die wohnung geputzt ;)
gibt dann immer ab und zu updates hier...
__________________________________________________________________
und dann noch ein paar links zum thema:
http://uavp.ch/moin open source quadrocopter proojekt
http://www.tt-tronix.de/ noch ein quadrocopterprojekt
http://forum.xufo.net/ quadrocopterforum
http://www.motodrone.org/ open source quadrocopter wettbewerb
http://chaosradio.ccc.de/cr138.html chaosradiosendung ueber quadrocopter
http://chaosradio.ccc.de/ctv110.html chaostv sendung ueber quadros
http://www.mikrokopter.com/ kommerzielles quadrocopterprojekt